







Ultrasound Imaging Links Soleus Muscle Neuromechanics and energetics during human Walking with Elastic Ankle Exoskeletons
Posted on: 29 April 2020
Preprint posted on 20 January 2020
Article now published in Scientific Reports at https://www.nature.com/articles/s41598-020-60360-4
Muscle-level analysis may provide answers to how the whole body responds to assistive devices.
Selected by Jonaz MorenoCategories: bioengineering
Background
The interest in assistive devices to improve quality of life has increased in the past decade. It has been shown that when people wear exoskeletons, the energy economy of walking improves by as much as 7.2%, meaning that people are able to rely less on biological energy consumption when using an external device to provide assistance when walking. A parallel exoskeleton can be attached to the lower limb and aid the plantarflexor muscles (soleus and gastrocnemius) with elastic components that can be tuned to different levels of stiffness. Increased stiffness has been shown to increase mechanical power assistance by the exoskeleton. However, the muscular response to the exoskeleton stiffness does not necessarily improve as the exoskeleton stiffness increases, hence an optimal exoskeleton stiffness that is not too stiff nor too compliant is the perfect setting to save metabolic energy. The purpose of this study was to test these ideas in vivo to capture muscle fascicle dynamics of the soleus using an ultrasound across different ankle exoskeleton stiffness settings during walking (Figure 1).
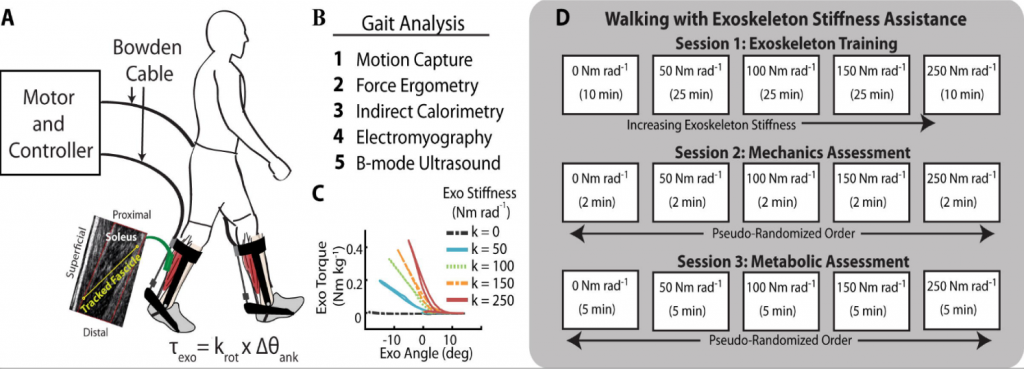
Figure 1: detailed workflow and experimental setting for the whole experiment. Reproduced from Figure 1 of the preprint (Nuckols et al.)
Key findings
All the reports presented in this project were based on the most compliant rotational stiffness (50 Nm rad-1) and the stiffest setting (250 Nm rad-1) against the control condition (0 Nm rad-1) of the exoskeleton. The metabolic cost of walking decreased by 4.2% with the most compliant stiffness (50 Nm rad-1) while it increased by 4.7% with the stiffest setting (250 Nm rad-1) of the exoskeleton. On the other hand, increasing the exoskeleton stiffness caused changes in the ankle joint dynamics (Figure 2): the authors found decreases in peak ankle dorsiflexion (from17.9±1.2 to 8.1±1.4 deg; 250 Nm rad-1 stiffness), biological ankle moment (from 1.59±0.04 to 1.14±0.03 Nm Kg-1; 250 Nm rad-1 stiffness) and average biological positive mechanical power (from 0.305±0.013 to 0.170±0.012 W kg-1; 250 Nm rad-1 stiffness). The response of the ankle dynamics and mechanical demand is overall decreased as exoskeleton stiffness increases.Therefore, it should be expected that the metabolic demand of the lower limb decreases and contributes to energy saving of the metabolic rate of the entire body.
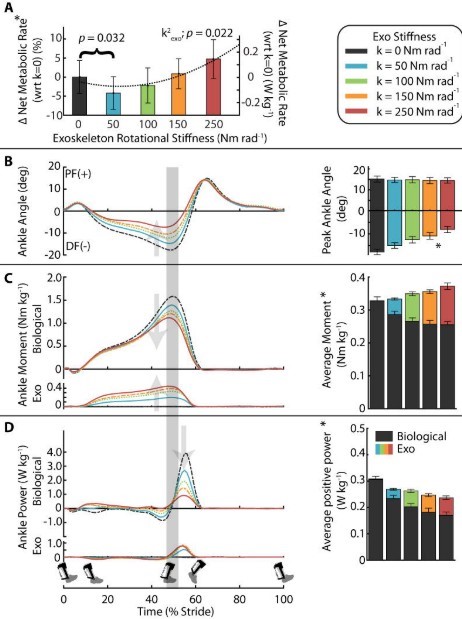
Figure 2. metabolic demand and ankle joint dynamics while wearing an ankle exoskeleton. Reproduced from Figure 2 of the preprint (Nuckols et al.)
Although overall ankle joint dynamics decreases, metabolic cost increases with increased stiffness. Further analysis of the muscle dynamics can provide an insight into why the exoskeleton assistance has an optimal setting for the stiffness. Their results indicate that the soleus peak force decreased (from 21.88±0.72 to 15.18±0.67 N kg-1; 250 Nm rad-1) and average force rate decreased during the late stance (40-60% stance) by up to 29% with the 250 Nm rad-1 stiffness. Also, soleus average activation rate (measure with surface electromyography) decreased with increased stiffness during the early stance (0-40% stance) by up to 21% (250 Nm rad-1). Likewise, peak length of the entire soleus muscle- tendon unit decreased with increased exoskeleton stiffness (from 308±6.6 mm to 301±6.9 mm; 250 Nm rad-1). Lastly, soleus fascicle length increased as exoskeleton stiffness increased, with the greatest fascicle length observed during the stiffest setting (250 Nm rad-1). This caused a shift of the fascicles towards their optimal length on the force-length curve. It is predicted that being closer to the optimal length of the fascicles, the muscle can generate more force. In contrast, the fascicle velocity also increased with a stiffer exoskeleton: the fastest shortening velocity was reported when participants used the stiffest setting. Increasing shortening fascicle is predicted to decrease the force production of the muscles (Figure 3).
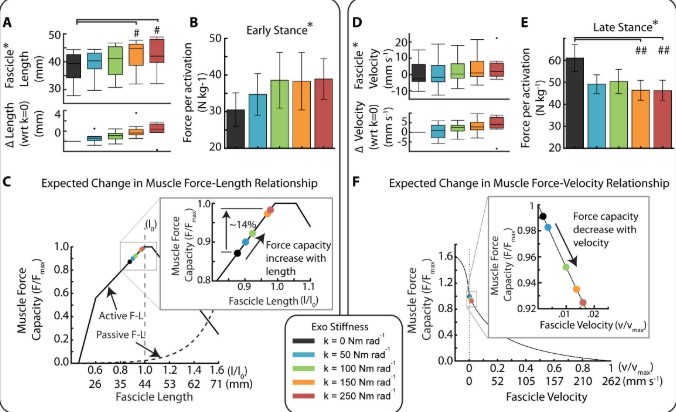
Figure 3. The force-length-velocity response of the fascicles to the exoskeleton assistance. Reproduction from Figure 4 of the preprint (Nuckols et al.)
Overall, this study has provided a new approach to gain insights into the effect of using an ankle exoskeleton at the muscular level. These results indicate a trade-off between increased exoskeleton assistance and muscle dynamics (decreased muscle force, increased fascicle length, and increased shortening velocity). The authors argue that the changes in muscle dynamics influences the rate of soleus active muscle volume which is linked to changes in metabolic rate . They also argue that finding a way to “shut-off” the muscle response to increased exoskeleton stiffness could allow greater aid from the assistive device, thus reducing muscle metabolism that impacts the whole-body metabolic cost.
What I liked about this preprint
This is the first study that has approached in vivo muscle dynamics during walking with an exoskeleton. Using the experimental information in mathematical algorithms has allowed them to describe muscle behavior in response to changes in the exoskeleton. Many previous in silico studies have used simple biomechanical analysis to gain insight about muscle behavior. Models and simulation studies can benefit from this study with comparable experimental information.
Open questions
- Your results and discussion covered the shifting of the Force-Length and Force-Velocity curve, indicating that fascicle length can generate more force production, but the velocity also increased which made me think this is what prevents muscle force generation with increased stiffness. Would you say that is important to prioritize fascicle velocity and try to keep it in a slow range? Have you thought to run simulations that can control for this?
- I liked the idea of the muscle spindle organs and the golgi tendon organs that interact with the muscle and respond to the exoskeleton assistance as a preventive Would it be possibletest these ideas on animals or any existent model that incorporates these organs during simulations?
- You described how different tuning of exoskeleton stiffness can be useful for specific Have you considered studies that include some of the special population you mentioned to have specific settings of the exoskeleton to facilitate rehabilitation?
- Your study focused on the soleus alone, yet the gastrocnemius also contributes to the muscle- tendon unit of the Would you expect similar results if including the gastrocnemius?
doi: https://doi.org/10.1242/prelights.19740
Read preprint (No Ratings Yet)
(No Ratings Yet)Sign up to customise the site to your preferences and to receive alerts
Register hereAlso in the bioengineering category:
Combinatorial and Inducible CRISPRa/i Enables Canalized hiPSC Forward Programming and Iterative Refinement via Single-Cell Genomics
Cell-ID
Detergent-Triggered Membrane Remodelling Monitored via Intramembrane Fluorescence De-Quenching
Cyntia Alves Conceição, Marcus Oliveira
A Novel Chimeric Antigen Receptor (CAR) - Strategy to Target EGFRVIII-Mutated Glioblastoma Cells via Macrophages
Dina Kabbara
preLists in the bioengineering category:
October in preprints – DevBio & Stem cell biology
Each month, preLighters with expertise across developmental and stem cell biology nominate a few recent developmental and stem cell biology (and related) preprints they’re excited about and explain in a single paragraph why. Short, snappy picks from working scientists — a quick way to spot fresh ideas, bold methods and papers worth reading in full. These preprints can all be found in the October preprint list published on the Node.
| List by | Deevitha Balasubramanian et al. |
CSHL 87th Symposium: Stem Cells
Preprints mentioned by speakers at the #CSHLsymp23
| List by | Alex Eve |
EMBL Synthetic Morphogenesis: From Gene Circuits to Tissue Architecture (2021)
A list of preprints mentioned at the #EESmorphoG virtual meeting in 2021.
| List by | Alex Eve |
3D Gastruloids
A curated list of preprints related to Gastruloids (in vitro models of early development obtained by 3D aggregation of embryonic cells). Updated until July 2021.
| List by | Paul Gerald L. Sanchez and Stefano Vianello |
ASCB EMBO Annual Meeting 2019
A collection of preprints presented at the 2019 ASCB EMBO Meeting in Washington, DC (December 7-11)
| List by | Madhuja Samaddar et al. |
EMBL Seeing is Believing – Imaging the Molecular Processes of Life
Preprints discussed at the 2019 edition of Seeing is Believing, at EMBL Heidelberg from the 9th-12th October 2019
| List by | Dey Lab |
Lung Disease and Regeneration
This preprint list compiles highlights from the field of lung biology.
| List by | Rob Hynds |
Advances in microscopy
This preList highlights exciting unpublished preprint articles describing advances in microscopy with a focus on light-sheet microscopy.
| List by | Stephan Daetwyler |