







Humans optimally anticipate and compensate for an uneven step during walking
Posted on: 29 January 2021
Preprint posted on 5 January 2021
Article now published in eLife at http://dx.doi.org/10.7554/eLife.65402
Maintaining constant speed when walking on an uneven terrain may be possible by minimizing mechanical work. This is observed in a tri-phasic trajectory of speed adjustments by anticipating and using a feedforward approach to the step.
Selected by Jonaz MorenoCategories: bioengineering, biophysics, neuroscience
Background
Human locomotion is associated with the minimization or maximization of different performance criteria. This concept is also referred as optimization of human locomotion and it is well established that when walking under preferred conditions, humans minimize their energy consumption. However, most of the studies have only tested this idea under even terrains like on a treadmill. Alternatively, it has been proposed that humans can plan ahead (feedforward) to preserve speed (momentum). Previous studies of an optimal control model of walking driven by a minimization of total push-off mechanical work can replicate human-like-walking patterns while maintaining the same speed. This is achieved by anticipating for the loss in time when taking a step up (Darici et al., 2018, 2020). So, the purpose of this study was to perform an experiment on humans to confirm whether minimization of total push-off work is a possible criterion to use when uneven terrain is present while walking.
Key findings
Based on the previous optimal control model of walking (Darici et al., 2020), the overall response was to speed up during the mid-stance of walking as soon as 2 steps before the approach to the step; an opposite response was observed when the model had to step-down (Figure 1). This model was driven by the walking dynamics while enforcing a steady, nominal speed. They ran the model with a nominal (no anticipation) and with an anticipatory strategy. The model showed a significant loss of speed during the nominal simulation (Figure 1a) compared to the compensatory approach (Figure 1b, 1c). The overall behavior of the model was consistent despite the changes in walking speed (faster and slower, Figure 1f).
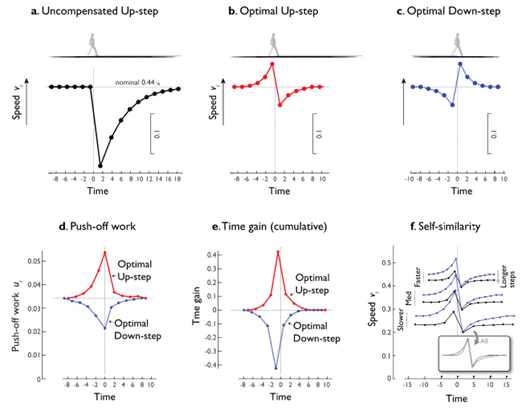 Figure 1. Model predictions for walking on a surface that has a 7.5 cm up-step. (a) Walking speed fluctuations vs time of the model when it does not compensate for the up-step (constant push off). Speed is sampled at mid-stance of each step (prior to step-to-step transition) and denoted with filled symbols. (b) speed fluctuation for optimal up-step compensation that minimizes push-off work. Model anticipates the perturbation with feedforward adjustment to speed up ahead of time, loses momentum atop the perturbation, and then regains speed thereafter. (c) Speed fluctuation for optimal down-step compensation is nearly opposite sign to the up-step compensation. (d) Optimal control inputs are sequence of push-off work, shown for up- and down-step. Up-step requires more work, while down-step is the opposite (less work) to walk same distance in same time. (e) Cumulative time gained for Up and Down-step compensations. (f) Self-similarity of Up-step compensation for three different nominal speeds and two different step lengths (adopted from Darici & Kuo, 2021).
Figure 1. Model predictions for walking on a surface that has a 7.5 cm up-step. (a) Walking speed fluctuations vs time of the model when it does not compensate for the up-step (constant push off). Speed is sampled at mid-stance of each step (prior to step-to-step transition) and denoted with filled symbols. (b) speed fluctuation for optimal up-step compensation that minimizes push-off work. Model anticipates the perturbation with feedforward adjustment to speed up ahead of time, loses momentum atop the perturbation, and then regains speed thereafter. (c) Speed fluctuation for optimal down-step compensation is nearly opposite sign to the up-step compensation. (d) Optimal control inputs are sequence of push-off work, shown for up- and down-step. Up-step requires more work, while down-step is the opposite (less work) to walk same distance in same time. (e) Cumulative time gained for Up and Down-step compensations. (f) Self-similarity of Up-step compensation for three different nominal speeds and two different step lengths (adopted from Darici & Kuo, 2021).
Results from the previous study using the model are the reference to confirm (or refute) whether humans have a similar approach to the step-up and step-down approach. A total of 12 healthy subjects were recruited for this study; they were encouraged to walk at consistent phase without providing any type of feedback. The intension was to mimic the unconstrained nature of daily living. Also, the model did not depend on a particular speed (Darici et al., 2021). Walking speed was measured using IMUs on each foot. The primary outcomes of this study were walking speed (Figure 2), step time, and step length. The average IMU speed measurements were then compared to the overall behavior of the model (Figure 3).
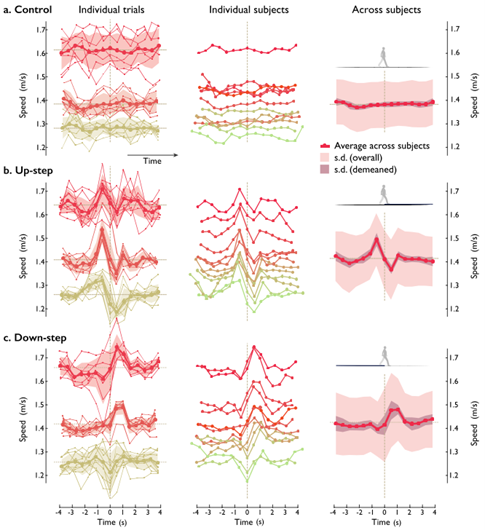
Figure 2. The graphs are organized by rows representing the nominal condition (no step, control), up-step, and down-step. The columns represent another grouping: the first column (left) Illustrates individual trials from three out of 12 subjects. The tick lines represent the average data from each of the three participants with the standard deviation (shaded regions ± 1 s.d.). The middle column is the average data of each individual subject (12 subjects, each different color). The right column Illustrates the average between subjects (all subjects) with the standard deviation of across all subjects (light shaded region), and standard deviation ignoring subject-dependent speed (darker shaded region) (adopted from Darici & Kuo, 2021).
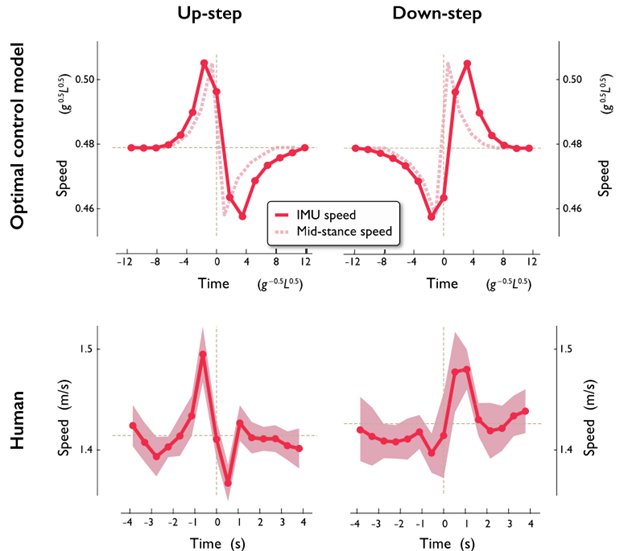
Figure 3. Comparison of model and human walking speed fluctuations vs. time corresponding for the up-step (left column), and the down-steps (right column). The top row is the model speed fluctuations predicted to minimize push-off mechanical work, while the bottom row is the experimentally measured compensation strategies for humans showing average speed pattern across subjects (shaded regions denoted ± 1 s.d. after eliminating variations in average speed). The vertical dashed line denotes the first up-step (left column) and down-step (right column). The horizontal dashed line denotes the average walking speed (adopted from Darici & Kuo, 2021).
Their conclusion was that the normal response to changes in terrain are associated with an anticipatory approach. Humans increase their speed at about 2 steps before the observed change in the landscape to maintain the overall same speed. From the optimal control model of previous studies, this response is coupled with the minimization of push-off work, as the overall shape of speed curve of the model and human responses are very similar to each other. The authors concluded that this compensatory response was a systematic, tri-phasic pattern in walking speed fluctuation that may be related to the use of the central nervous system control with feedback and feedforward (anticipatory) components.
What I liked about this preprint
The area of human movement optimization has been around for very long time. The most predominant concept is that humans optimize energy consumption when walking under preferred conditions (i.e., preferred walking speed or stride frequency). One of the limitations to this area of research is that we are still unable to really understand how humans can behave under an optimal control framework. Continuing to test out whether optimal control theory is crucial for natural human walking patterns and can provide valuable information that can potentially lead to improving assistive devices, or have a new insight to develop new and different rehabilitation practices that can improve recovery on special populations that deviate from this optimal control framework.
Open Questions
- You have mentioned that one of the ways people can gather information to anticipate and provide a feedforward control is through Would it be possible to make changes in the visual system (i.e., make our vision blurry) and run this study again to see if we are only relying on the visual information? Any thoughts on the role of the vestibular system and its link to the visual system?
- Would you expect to see similar responses to different step heights?
- One of the main limitations around the optimal control theory is that the conclusions are typically drawn from laboratory experiments. I like the fact that you implemented IMUs to get your dependent variables. Do you intend to build upon this and maybe have people walk outside the laboratory?
References
Darici, O., Temeltas, H., & Kuo, A. D. (2018). Optimal regulation of bipedal walking speed despite an unexpected bump in the road. PLoS ONE, 13(9), 1–16. https://doi.org/10.1371/journal.pone.0204205
Darici, O., Temeltas, H., & Kuo, A. D. (2020). Anticipatory Control of Momentum for Bipedal Walking on Uneven Terrain. Scientific Reports, 10(1), 1–12. https://doi.org/10.1038/s41598-019-57156-6
doi: https://doi.org/10.1242/prelights.27200
Read preprint (No Ratings Yet)
(No Ratings Yet)Sign up to customise the site to your preferences and to receive alerts
Register hereAlso in the bioengineering category:
Combinatorial and Inducible CRISPRa/i Enables Canalized hiPSC Forward Programming and Iterative Refinement via Single-Cell Genomics
Cell-ID
Detergent-Triggered Membrane Remodelling Monitored via Intramembrane Fluorescence De-Quenching
Cyntia Alves Conceição, Marcus Oliveira
A Novel Chimeric Antigen Receptor (CAR) - Strategy to Target EGFRVIII-Mutated Glioblastoma Cells via Macrophages
Dina Kabbara
Also in the biophysics category:
Mechanically-induced Septin Networks Protect Nuclear Integrity
Filipe Nunes Vicente
Loss of Sun2 ablates nuclear mechanosensing-driven extracellular matrix production and mitigates lung fibrosis
Beth Chopak
Shape independent fluidisation in epithelial monolayers
Sindhu Muthukrishnan
Also in the neuroscience category:
Behavioral characteristics of an extremely old rhesus macaque in a zoo: Dementia-like symptoms and implications for quality of life of geriatric animals
Stefan Friedrich Wirth
EBV reprograms autoreactive anti-CNS B cells as antigen presenting cells in multiple sclerosis
Léa Bastien et al.
The Endocannabinoid System’s Contribution to Placebo Analgesia
Thomas Nicodemo Arrieta et al.
preLists in the bioengineering category:
October in preprints – DevBio & Stem cell biology
Each month, preLighters with expertise across developmental and stem cell biology nominate a few recent developmental and stem cell biology (and related) preprints they’re excited about and explain in a single paragraph why. Short, snappy picks from working scientists — a quick way to spot fresh ideas, bold methods and papers worth reading in full. These preprints can all be found in the October preprint list published on the Node.
| List by | Deevitha Balasubramanian et al. |
CSHL 87th Symposium: Stem Cells
Preprints mentioned by speakers at the #CSHLsymp23
| List by | Alex Eve |
EMBL Synthetic Morphogenesis: From Gene Circuits to Tissue Architecture (2021)
A list of preprints mentioned at the #EESmorphoG virtual meeting in 2021.
| List by | Alex Eve |
3D Gastruloids
A curated list of preprints related to Gastruloids (in vitro models of early development obtained by 3D aggregation of embryonic cells). Updated until July 2021.
| List by | Paul Gerald L. Sanchez and Stefano Vianello |
ASCB EMBO Annual Meeting 2019
A collection of preprints presented at the 2019 ASCB EMBO Meeting in Washington, DC (December 7-11)
| List by | Madhuja Samaddar et al. |
EMBL Seeing is Believing – Imaging the Molecular Processes of Life
Preprints discussed at the 2019 edition of Seeing is Believing, at EMBL Heidelberg from the 9th-12th October 2019
| List by | Dey Lab |
Lung Disease and Regeneration
This preprint list compiles highlights from the field of lung biology.
| List by | Rob Hynds |
Advances in microscopy
This preList highlights exciting unpublished preprint articles describing advances in microscopy with a focus on light-sheet microscopy.
| List by | Stephan Daetwyler |
Also in the biophysics category:
October in preprints – DevBio & Stem cell biology
Each month, preLighters with expertise across developmental and stem cell biology nominate a few recent developmental and stem cell biology (and related) preprints they’re excited about and explain in a single paragraph why. Short, snappy picks from working scientists — a quick way to spot fresh ideas, bold methods and papers worth reading in full. These preprints can all be found in the October preprint list published on the Node.
| List by | Deevitha Balasubramanian et al. |
October in preprints – Cell biology edition
Different preLighters, with expertise across cell biology, have worked together to create this preprint reading list for researchers with an interest in cell biology. This month, most picks fall under (1) Cell organelles and organisation, followed by (2) Mechanosignaling and mechanotransduction, (3) Cell cycle and division and (4) Cell migration
| List by | Matthew Davies et al. |
March in preprints – the CellBio edition
A group of preLighters, with expertise in different areas of cell biology, have worked together to create this preprint reading lists for researchers with an interest in cell biology. This month, categories include: 1) cancer biology 2) cell migration 3) cell organelles and organisation 4) cell signalling and mechanosensing 5) genetics and genomics 6) other
| List by | Girish Kale et al. |
Biologists @ 100 conference preList
This preList aims to capture all preprints being discussed at the Biologists @100 conference in Liverpool, UK, either as part of the poster sessions or the (flash/short/full-length) talks.
| List by | Reinier Prosee, Jonathan Townson |
February in preprints – the CellBio edition
A group of preLighters, with expertise in different areas of cell biology, have worked together to create this preprint reading lists for researchers with an interest in cell biology. This month, categories include: 1) biochemistry and cell metabolism 2) cell organelles and organisation 3) cell signalling, migration and mechanosensing
| List by | Barbora Knotkova et al. |
preLights peer support – preprints of interest
This is a preprint repository to organise the preprints and preLights covered through the 'preLights peer support' initiative.
| List by | preLights peer support |
66th Biophysical Society Annual Meeting, 2022
Preprints presented at the 66th BPS Annual Meeting, Feb 19 - 23, 2022 (The below list is not exhaustive and the preprints are listed in no particular order.)
| List by | Soni Mohapatra |
EMBL Synthetic Morphogenesis: From Gene Circuits to Tissue Architecture (2021)
A list of preprints mentioned at the #EESmorphoG virtual meeting in 2021.
| List by | Alex Eve |
Biophysical Society Meeting 2020
Some preprints presented at the Biophysical Society Meeting 2020 in San Diego, USA.
| List by | Tessa Sinnige |
ASCB EMBO Annual Meeting 2019
A collection of preprints presented at the 2019 ASCB EMBO Meeting in Washington, DC (December 7-11)
| List by | Madhuja Samaddar et al. |
EMBL Seeing is Believing – Imaging the Molecular Processes of Life
Preprints discussed at the 2019 edition of Seeing is Believing, at EMBL Heidelberg from the 9th-12th October 2019
| List by | Dey Lab |
Biomolecular NMR
Preprints related to the application and development of biomolecular NMR spectroscopy
| List by | Reid Alderson |
Biophysical Society Annual Meeting 2019
Few of the preprints that were discussed in the recent BPS annual meeting at Baltimore, USA
| List by | Joseph Jose Thottacherry |
Also in the neuroscience category:
preLighters’ choice – Handpicked DevBio preprints
preLighters with expertise across developmental and stem cell biology have nominated a few developmental biology (and related) preprints they’re excited about and explain in a few paragraph why. Concise preprint highlights, prepared by the preLighter community – a quick way to spot upcoming trends, new methods and fresh ideas.
| List by | Theodora Stougiannou et al. |
BSDB Spring Meeting: Molecules to Morphogenesis
The British Society for Developmental Biology (BSDB) Spring Meeting Molecules to Morphogenesis was held from 23–26 March 2026 at the University of Warwick (UK). This meeting brought together a vibrant community of researchers to discuss how molecular mechanisms are integrated across scales to drive morphogenesis, spanning diverse model systems and approaches. This preList contains preprints by presenters from the talk and poster sessions at the meeting. Please do get in touch at preLights@biologists.com if you notice any relevant preprints that we may have missed.
| List by | Ingrid Tsang |
Keystone Symposium on Stem Cell Models in Embryology 2026
The Keystone Symposium on Stem Cell Models in Embryology, 2026, was organised by Jun Wu (UT Southwestern), Jianping Fu (University of Michigan) and Miki Ebisuya (TU Dresden) and held at Asilomar Conference Grounds in California (US). The meeting discussed recent advances made in establishing stem-cell-based embryo models, what fundamental insights into developmental processes have been gleaned from them, as well as how they are beginning to be applied more widely. This prelist contains preprints by presenters at the talk and poster sessions at the conference, which our Reviews Editor in attendance spotted. Please do reach out to preLights@biologists.com if you notice any that we’ve missed.
| List by | Ingrid Tsang |
November in preprints – DevBio & Stem cell biology
preLighters with expertise across developmental and stem cell biology have nominated a few developmental and stem cell biology (and related) preprints posted in November they’re excited about and explain in a single paragraph why. Concise preprint highlights, prepared by the preLighter community – a quick way to spot upcoming trends, new methods and fresh ideas.
| List by | Aline Grata et al. |
October in preprints – DevBio & Stem cell biology
Each month, preLighters with expertise across developmental and stem cell biology nominate a few recent developmental and stem cell biology (and related) preprints they’re excited about and explain in a single paragraph why. Short, snappy picks from working scientists — a quick way to spot fresh ideas, bold methods and papers worth reading in full. These preprints can all be found in the October preprint list published on the Node.
| List by | Deevitha Balasubramanian et al. |
October in preprints – Cell biology edition
Different preLighters, with expertise across cell biology, have worked together to create this preprint reading list for researchers with an interest in cell biology. This month, most picks fall under (1) Cell organelles and organisation, followed by (2) Mechanosignaling and mechanotransduction, (3) Cell cycle and division and (4) Cell migration
| List by | Matthew Davies et al. |
July in preprints – the CellBio edition
A group of preLighters, with expertise in different areas of cell biology, have worked together to create this preprint reading lists for researchers with an interest in cell biology. This month, categories include: (1) Cell Signalling and Mechanosensing (2) Cell Cycle and Division (3) Cell Migration and Cytoskeleton (4) Cancer Biology (5) Cell Organelles and Organisation
| List by | Girish Kale et al. |
May in preprints – the CellBio edition
A group of preLighters, with expertise in different areas of cell biology, have worked together to create this preprint reading lists for researchers with an interest in cell biology. This month, categories include: 1) Biochemistry/metabolism 2) Cancer cell Biology 3) Cell adhesion, migration and cytoskeleton 4) Cell organelles and organisation 5) Cell signalling and 6) Genetics
| List by | Barbora Knotkova et al. |
April in preprints – the CellBio edition
A group of preLighters, with expertise in different areas of cell biology, have worked together to create this preprint reading lists for researchers with an interest in cell biology. This month, categories include: 1) biochemistry/metabolism 2) cell cycle and division 3) cell organelles and organisation 4) cell signalling and mechanosensing 5) (epi)genetics
| List by | Vibha SINGH et al. |
Biologists @ 100 conference preList
This preList aims to capture all preprints being discussed at the Biologists @100 conference in Liverpool, UK, either as part of the poster sessions or the (flash/short/full-length) talks.
| List by | Reinier Prosee, Jonathan Townson |
2024 Hypothalamus GRC
This 2024 Hypothalamus GRC (Gordon Research Conference) preList offers an overview of cutting-edge research focused on the hypothalamus, a critical brain region involved in regulating homeostasis, behavior, and neuroendocrine functions. The studies included cover a range of topics, including neural circuits, molecular mechanisms, and the role of the hypothalamus in health and disease. This collection highlights some of the latest advances in understanding hypothalamic function, with potential implications for treating disorders such as obesity, stress, and metabolic diseases.
| List by | Nathalie Krauth |
‘In preprints’ from Development 2022-2023
A list of the preprints featured in Development's 'In preprints' articles between 2022-2023
| List by | Alex Eve, Katherine Brown |
CSHL 87th Symposium: Stem Cells
Preprints mentioned by speakers at the #CSHLsymp23
| List by | Alex Eve |
Journal of Cell Science meeting ‘Imaging Cell Dynamics’
This preList highlights the preprints discussed at the JCS meeting 'Imaging Cell Dynamics'. The meeting was held from 14 - 17 May 2023 in Lisbon, Portugal and was organised by Erika Holzbaur, Jennifer Lippincott-Schwartz, Rob Parton and Michael Way.
| List by | Helen Zenner |
FENS 2020
A collection of preprints presented during the virtual meeting of the Federation of European Neuroscience Societies (FENS) in 2020
| List by | Ana Dorrego-Rivas |
ASCB EMBO Annual Meeting 2019
A collection of preprints presented at the 2019 ASCB EMBO Meeting in Washington, DC (December 7-11)
| List by | Madhuja Samaddar et al. |
SDB 78th Annual Meeting 2019
A curation of the preprints presented at the SDB meeting in Boston, July 26-30 2019. The preList will be updated throughout the duration of the meeting.
| List by | Alex Eve |
Autophagy
Preprints on autophagy and lysosomal degradation and its role in neurodegeneration and disease. Includes molecular mechanisms, upstream signalling and regulation as well as studies on pharmaceutical interventions to upregulate the process.
| List by | Sandra Malmgren Hill |
Young Embryologist Network Conference 2019
Preprints presented at the Young Embryologist Network 2019 conference, 13 May, The Francis Crick Institute, London
| List by | Alex Eve |